рух твердого тіла, як і рух крапки, може бути складним.
Нехай тіло здійснює деякий рух щодо системи координат 0 x 1 y 1 z 1 , яка, у свою чергу, рухається щодо нерухомих осей xyz.Відноснимрухом тіла називають його рух по відношенню до рухомої системи координат 0 x 1 y 1 z 1 . Для з'ясування переносногоруху тіла в кожний момент часу слід вважати тіло жорстко скріпленим з рухомою системою відліку, і рух, який здійснюватиме тіло з рухомою системою відліку щодо нерухомої системи, і буде переносним рухом. Рух тіла щодо нерухомої системи координат називається абсолютним.
Основним завданням кінематики складного руху твердого тіла є встановлення співвідношень між кінематичними характеристиками абсолютного, відносного та переносного рухів. Складне рух твердого тіла може складатися з поступальних та обертальних рухів або може бути отримано в результаті складання поступального та обертального рухів. У деяких задачах кінематики заданий складний рух твердого тіла розкладають на складові руху (аналіз); в інших – потрібно визначити складний рух як результат складання простіших (синтез). Як при аналізі, так і при синтезі рухів йдеться про розкладання та складання рухів, що розглядаються в даний момент (миттєвих рухів).
Складання поступальних рухів твердого тіла
Нехай тверде тіло одночасно бере участь у двох миттєво поступальних рухах, з яких одне є поступальним зі швидкістю v 1 , друге - переносним зі швидкістю v 2 (рис 2.73). Виділимо якусь точку Мтіла. Знайдемо абсолютну швидкість точки М
v a = v r + v e = v 1 + v 2 . (2.113)
Так як і відносний, і переносний рух твердого тіла є миттєво поступальними, то відносні, переносні і, отже, згідно з формулою (2.113), абсолютні швидкості всіх точок тіла будуть рівними між собою в кожний момент часу (рівні за величиною і паралельні за напрямом) , тобто. абсолютний рух тіла також є миттєво поступальним.
Очевидно, що цей висновок застосовний до складного руху твердого тіла, що складається з трьох і більше миттєво поступальних рухів, тоді в загальному випадку
Отже, внаслідок складання миттєвих поступальних рухів твердого тіла результуючий рух виходить миттєво поступальним.
Зауваження. Миттєво поступальний рух твердого тіла відрізняється від поступального тим, що при поступальному русі в кожний момент часу рівні між собою швидкості та прискорення всіх точок тіла, а при миттєво поступальному русі в даний момент часу рівні між собою тільки швидкості всіх точок тіла.
66, 67 Складання обертань навколо паралельних осей
Розглянемо випадок, коли відносний рух тіла є обертанням
з кутовою швидкістю навколо осі, закріпленої на кривошипі (рис.1а), а переносне - обертанням кривошипа навколо осі, паралельної, з кутовою швидкістю. Тоді рух тіла буде плоскопаралельним по відношенню до площини перпендикулярної до осей.
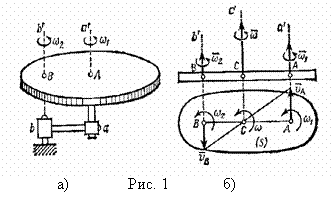
Візьмемо, що обертання направлені в один бік. Зобразимо перетин тіла площиною, перпендикулярною до осей (рис. 1 б). Сліди осей у перерізі позначимо літерами та . Тоді і . При цьому вектори і паралельні один одному перпендикулярні і спрямовані в різні сторони. Тоді точка є миттєвим центром швидкостей , а отже, вісь , паралельна осям і є миттєвою віссю обертання. Для визначення кутової швидкості абсолютного обертання тіла навколо осі та положення самої осі, тобто. точки , скористаємося властивістю миттєвого центру швидкостей
![]() .
.
Підставивши в ці рівності значення і остаточно отримаємо
Отже, при додаванні двох спрямованих в один бік обертань навколо паралельних осей результуючий рух тіла буде миттєвим обертанням з абсолютною швидкістю навколо миттєвої осі, паралельною даним, положення якої визначається пропорціями (2).
З часом миттєва вісь обертання змінює своє положення, описуючи циліндричну поверхню.

Розглянемо тепер випадок, коли обертання спрямовані різні сторони (рис.2).
Припустимо, що . Тоді, міркуючи, як у попередньому випадку, для кутової швидкості абсолютного руху тіла навколо осі та положення самої осі, отримаємо
Таким чином, при додаванні двох спрямованих у різні сторони обертань навколо паралельних осей, результуючий рух тіла буде миттєвим обертанням з абсолютною кутовою швидкістю навколо миттєвої осі, положення якої визначається пропорціями (4).
Зауважимо, що у цьому випадку точка ділить відстань між паралельними осями зовнішнім чином.
Розглянемо окремий випадок, коли обертання навколо паралельних осей направлені в різні боки, але за модулем (рис.3).

Така сукупність обертань називається парою обертань, а вектори утворюють пару кутових швидкостей. І тут отримаємо і , тобто = . Тоді миттєвий центр швидкостей знаходиться в нескінченності і всі точки тіла в даний момент мають однакові швидкості.
Отже, результуючий рух тіла буде поступальним (або миттєво поступальним) рухом зі швидкістю, чисельно рівною і спрямованою перпендикулярно до площини, що проходить через вектори і . Таким чином, пара обертань еквівалентна миттєво поступальному руху зі швидкістю, що дорівнює моменту пари кутових швидкостей цих обертань.
Прикладом пари кутових швидкостей є рух велосипедної педалі щодо рами велосипеда (рис.4).

Цей рух являє собою сукупність переносного обертання разом з кривошипом навколо осі та відносного обертання педалі по відношенню до кривошипу навколо осі. Педаль весь час руху залишається паралельної своєму початковому становищу, тобто. здійснює поступальний рух.
Розглянемо кілька прикладів.
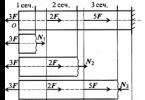
Приклад 1. Кривошип обертається навколо осі за годинниковою стрілкою з кутовою швидкістю, а диск радіусу обертається навколо осі за годинниковою стрілкою з тією ж кутовою швидкістю щодо кривошипа. Знайти величину та напрямок абсолютних швидкостей точок і (рис.5).

Рішення. Так як кутові швидкості переносного та відносного обертань рівні по модулю і спрямовані в одну сторону, то миттєвий центр обертання диска лежить посередині між , тобто. ![]() . Модуль абсолютної кутової швидкості обертання диска навколо точки дорівнює. Звідси знаходимо:
. Модуль абсолютної кутової швидкості обертання диска навколо точки дорівнює. Звідси знаходимо:
![]() , ,
, ,
![]() , .
, .

Приклад 2. Кривошип обертається навколо осі з кутовою швидкістю. На палець кривошипа вільно насаджена шестерня радіусу, зчеплена з нерухомим зубчастим колесом радіусу. Знайти абсолютну кутову швидкість шестірні та її кутову швидкість щодо кривошипа (рис.6).
Рішення. Оскільки шестерня зчеплена з нерухомим колесом, абсолютна швидкість точки зачеплення шестерні з цим колесом дорівнює нулю, тобто. точка є для шестірні миттєвим центром обертання. Звідси ![]() або ,
або ,
Зауважимо, що напрямок обертання шестерні збігається з напрямком обертання кривошипу.
Тоді абсолютну кутову швидкість шестерні знаходимо з рівності
Якщо тіло одночасно бере участь у переносному поступальному русі зі швидкістю і відносному обертальному з кутовою швидкістю, то залежно від їх взаємного розташування доцільно розглянути три окремі випадки.
1. Швидкість поступального руху перпендикулярна до осі відносного обертання.І тут вектори і перпендикулярні (рис.53). На лінії ОС, перпендикулярної площині в якій розташовані і є точка Зшвидкість якої дорівнює нулю. Визначаємо її відстань від точки Про.
За теоремою складання швидкостей для точки Змаємо
тому що при обертанні навколо осі
Враховуючи, що швидкості та протилежні за напрямком, отримаємо
Так як , то і, отже, точки Зі Прознаходяться на відстані
Інші точки, що мають швидкості, рівні нулю, розташовуються на лінії, що проходить через точку З, паралельно осі обертання тіла з кутовою швидкістю. Таким чином, є миттєва вісь обертання, паралельна осі відносного обертання і проходить через точку З.
При додаванні поступального переносного та обертального відносного рухів твердого тіла, у якого швидкість поступального руху перпендикулярна осі відносного обертання, еквівалентний абсолютний рух є обертанням навколо миттєвої осі, паралельної осі відносного обертання з кутовою швидкістю, що збігається з кутовою швидкістю відносного обертання.
2. Гвинтовий рух.Рух, при якому швидкість переносного поступального руху тіла паралельна осі відносного обертання, називається в і н т о в і м д в і ж е н е м т е р д о г о т е л а (рис.54). Вісь обертання тіла в цьому випадку називається витівковою. При гвинтовому русі тіло рухається поступово паралельно осі гвинтового руху та обертається навколо цієї осі. Гвинтовий рух не приводиться до будь-якого іншого простого еквівалентного руху.
При гвинтовому русі вектори можуть мати як однакові, і протилежні напрями. Гвинтовий рух тіла характеризується по р а м е т р о м в і н т о в о г о г о д в і ж е н я, яким вважають величину . Якщо і змінюються з часом, то параметри гвинтового руху є змінними. У випадку , і , тобто. p є переміщення тіла вздовж осі гвинтового руху за повороті тіла однією радіан.
Для точки Ммаємо
Але де r- Відстань точки до гвинтової осі. Швидкості та перпендикулярні. Отже,
Враховуючи, що , отримуємо
Якщо тіло обертається з постійною кутовою швидкістю і має постійну швидкість поступального руху, то такий рух тіла називається постійним рухомим рухом. У цьому випадку точка тіла під час руху весь час знаходиться на поверхні кругового циліндра з радіусом r.Траєкторією точки є гвинтова лінія. Крім параметра в даному випадку вводять крок гвинта, тобто відстань, на яку переміститься якась точка тіла при одному обороті тіла навколо осі гвинтового руху. Кут повороту тіла обчислюється за формулою . Для одного обороту тіла. Необхідний для цього час.
За час Тточка переміститься в напрямку, паралельному гвинтовій осі, на крок гвинта.
Звідси виходить залежність кроку гвинта від параметра гвинтового руху.
Рівняння руху точки Мтіла по гвинтовій лінії (рис.102) у декартових координатах виражаються у наступній формі:
У цих рівняннях величини є постійними.
3. Загальний випадок.Нехай швидкість переносного поступального руху та кутова швидкість відносного обертання утворюють кут. Випадок коли , і вже розглянуті.мають всі точки тіла. Таким чином, отримано гвинтовий рух з гвинтовою віссю, що віддаляється від початкової осі обертання на величину.
Параметр отриманого гвинтового руху.
Загальний випадок переносного поступального та відносного обертального рухів твердого тіла виявився еквівалентним миттєвому гвинтовому руху.
Деталі Категорія: Переглядів: 975
Гвинтовий рух. Якщо рух незмінної системи (наприклад, твердого тіла) складається з обертання біля осі та поступального руху вздовж цієї осі, такий рух тіла називається гвинтовим рухом; зазначена вісь називається гвинтовою віссю, або віссю обертання - ковзання. Якщо дані два довільні положення рухається в просторі тіла, то перехід з положення I в II можна виконати одним гвинтовим рухом біля виразно розташованої гвинтової осі (теорема Шаля); при цьому обертальний і поступальний рух можуть виконуватися або одночасно, або послідовно в будь-якому порядку. Розглядаючи все це переміщення тіла в просторі як складається з нескінченно малих елементарних переміщень і застосовуючи до кожного з них теорему Шаля, отримуємо таке положення: всякий рух тіла в просторі є рядом нескінченно малих гвинтових переміщень біля миттєвих гвинтових осей, які в кожний момент змінюють своє положення та напрямок у просторі.
Гвинтові елементарні переміщення тіла біля кожної миттєвої осі є рухами, еквівалентними нескінченно малим дійсним переміщенням тіла, і представляють їх з точністю до нескінченно малих велич вищих порядків. Закони гвинтового переміщення, еквівалентного будь-якому переміщенню твердого тіла, було встановлено Моцци (Giulio Mozzi, 1768). Додавання двох гвинтових переміщень дає в результаті також гвинтове переміщення.
Розглянемо складний рух твердого тіла, що складається з поступального та обертального рухів. Відповідний приклад показано на рис. 78. Тут відносним рухом тіла 1 є обертання з кутовою швидкістю навколо осі Аа,зміцненої на платформі 2, а переносним - поступальний рух платформи зі швидкістю. Одночасно у двох таких рухах бере участь і колесо 3, для якого відносним рухом є обертання навколо його осі, а переносним – рух тієї ж платформи. Залежно від значення кута між векторами і (для колеса цей кут дорівнює 90°) тут можливі три випадки.
1. Швидкість поступального руху перпендикулярна до осі обертання ( ). Нехай складний рух тіла складається з обертального руху навколо осі Ааз кутовою швидкістю ω і поступального руху зі швидкістю перпендикулярною (рис. 79). Очевидно, що цей рух є (по відношенню до площини П, перпендикулярної осі Аа) плоскопаралельний рух.
Якщо рахувати точку Аполюсом, то аналізований рух, як і всякий плоскопаралельний буде справді складатися з поступального зі швидкістю , тобто зі швидкістю полюса, і з обертального навколо осі Аа, що проходить через полюс.
Вектор згідно розділу 6.2 можна замінити парою кутових швидкостей і , приймаючи , а . При цьому відстань АРвизначиться з рівності, звідки .
Вектори і дають при додаванні нуль і, отже, рух тіла в цьому випадку можна розглядати як миттєве обертання навколо осі Ррз кутовою швидкістю. Таким чином, поворот тіла навколо осей Ааі Ррвідбувається з однією і тією ж кутовою швидкістю, тобто обертальна частина руху не залежить від вибору полюса.
2. Гвинтовий рух ( ). Якщо складний рух тіла складається з обертального навколо осі Ааз кутовою швидкістю та поступального зі швидкістю , спрямованою паралельно осі Аа(Рис. 80), то такий рух тіла називається гвинтовим.Ось Ааназивають віссю гвинта.Коли вектори і спрямовані в один бік, то за прийнятого нами правила зображення гвинт буде правим; якщо у різні боки – лівим.Відстань, що проходить під час одного обороту будь-якою точкою тіла, що лежить на осі гвинта, називається кроком hгвинта. Якщо величини і постійні, крок гвинта також буде постійним. Позначаючи час одного обороту через Т, отримуємо у разі і , звідки .
При постійному кроці будь-яка точка Мтіла, що не лежать на осі гвинта, описує гвинтову лінію.Швидкість точки М, що знаходиться від осі гвинта на відстані rскладається з поступальної швидкості та перпендикулярної їй швидкості, одержуваної у обертальному русі, яка чисельно дорівнює ω r.Отже ![]() .
.
Направлена швидкість по дотичній гвинтовій лінії. Якщо циліндрична поверхня, по якій рухається точка М,розрізати вздовж твірної і розгорнути, то гвинтові лінії звернуться в прямі, нахилені до основи циліндра під кутом , де ![]() .
.
3. Швидкість поступального руху утворює довільний кут із віссю обертання.Складне рух, яке відбувається тілом у разі (рис. 81, а), можна як загальний випадок руху вільного твердого тіла.
Розкладемо вектор (рис. 81, б) на складові: , спрямовану вздовж (), і перпендикулярну () . Швидкість можна замінити парою кутових швидкостей і , після чого вектори можна відкинути. Відстань АСзнайдемо за формулою.
Тоді у тіла залишається обертання з кутовою швидкістю та поступальний рух зі швидкістю. Отже, розподіл швидкостей точок тіла в даний момент часу буде таким же, як при гвинтовому русі навколо осі Ссз кутовою швидкістю та поступальною швидкістю.
Виконавши перетворення (рис. 81 б), ми перейшли від полюса Адо полюса З. Результат підтверджує, що у випадку руху твердого тіла кутова швидкість при зміні полюса не змінюється (), а змінюється лише поступальна швидкість ().
Так як при русі вільного твердого тіла величини α будуть весь час змінюватися, то безперервно змінюватиметься і положення осі Сс, яку тому називають миттєвою гвинтовою віссю.Таким чином, рух вільного твердого тіла можна ще розглядати як складається з серії миттєвих гвинтових рухів навколо гвинтових осей, що безперервно змінюються..
Висновок
Роль і місце теоретичної механіки в інженерній освіті визначається тим, що вона є науковою базою багатьох областей сучасної техніки. Засвоєння теоретичної механіки ускладнюється тим, що у цій науці істотну роль грає моделювання та математичне уявлення досліджуваних явищ природи. Тому при вирішенні інженерних завдань студенти часто мають значні труднощі. Проблему формування у студентів дослідницького підходу до поставлених завдань (з розділу «Кінематика» курсу теоретичної механіки) дозволяє вирішити пропонований навчальний посібник. У посібнику доступні основні теми розділу «Кінематика» з наведенням усіх необхідних доказів. Дано методичні рекомендації до вирішення завдань та наведено приклади їх вирішення. Освоєння та закріплення викладеного матеріалу допоможуть завдання для самостійної роботи, наведені в кінці розділів посібника.
Розглянемо складний рух твердого тіла, що складається з поступального та обертального рухів. Відповідний приклад показано на рис. 207. Тут відносним рухом тіла 1 є обертання з кутовою швидкістю навколо осі укріпленої на платформі 2, а переносним - поступальний рух платформи зі швидкістю v. Одночасно у двох таких рухах бере участь і колесо 3, для якого відносним рухом обертання навколо його осі, а переносним - рух тієї ж платформи. Залежно від значення кута між векторами і v (для колеса цей кут дорівнює 90°) тут можливі три випадки.
1. Швидкість поступального руху перпендикулярна до осі обертання Нехай складний рух тіла складається з обертального руху навколо осі з кутовою швидкістю з і поступального руху зі швидкістю v, перпендикулярною (рис. 208).


Легко бачити, що цей рух є (по відношенню до площини П, перпендикулярної осі) плоскопаралельний рух, докладно вивчений в гол. XI. Якщо вважати точку А полюсом, то рух, що розглядається, як і всяке плоскопаралельне, буде справді складатися з поступального зі швидкістю тобто зі швидкістю полюса, і з обертального навколо осі проходить через полюс.
Вектор v можна замінити парою кутових швидкостей (див. § 69), беручи . При цьому відстань АР визначиться з рівності звідки (з огляду на те, що )
Вектори дають при додаванні нуль, і ми отримуємо, що рух тіла в цьому випадку можна розглядати як миттєве обертання навколо осі з кутовою швидкістю . Цей результат було раніше отримано іншим шляхом (див. § 56). Порівнюючи рівності (55) і (107), бачимо, що точка Р для перерізу S тіла є миттєвим центром швидкостей. не залежить від вибору полюса (див. § 52).
2. Гвинтовий рух (). Якщо складний рух тіла складається з обертального навколо осі з кутовою швидкістю з і поступального зі швидкістю v, спрямованої паралельно осі (мал. 209), такий рух тіла називається гвинтовим. Вісь називають віссю гвинта.
Коли вектори спрямовані в один бік, то при прийнятому нами правилі зображення про гвинт буде правим; якщо в різні боки – лівим.
Відстань, що проходить під час одного обороту будь-якою точкою тіла, що лежить на осі гвинта, називається кроком гвинта. Якщо величини і постійні, то крок гвинта також буде постійним. Позначаючи час одного обороту через Т, отримуємо в цьому випадку, звідки


При постійному кроці будь-яка точка М тіла, що не лежить на осі гвинта, визначає гвинтову лінію. Швидкість точки М, що знаходиться від осі гвинта на відстані , складається з поступальної швидкості v і перпендикулярної їй швидкості, одержуваної у обертальному русі, яка чисельно дорівнює Отже,
![]()
Направлена швидкість по дотичній гвинтовій лінії. Якщо циліндричну поверхню, по якій рухається точка М, розрізати вздовж твірної і розгорнути, то гвинтові лінії звернуться в прямі, нахилені до основи циліндра під кутом
3. Швидкість поступального руху утворює довільний кут із віссю обертання. Складне рух, яке відбувається тілом у разі (рис. 210, а), є рух, розглянутий у § 63 (загальний випадок руху вільного твердого тіла).
Розкладемо вектор v (рис. 210, б) на складові: спрямовану вздовж перпендикулярну Швидкість можна замінити парою кутових швидкостей (як на рис. 208), після чого вектори можна відкинути. Відстань АС знайдемо за формулою (107).