V tomto článku sa budeme venovať:
- čo sú kolineárne vektory;
- aké sú podmienky pre kolineárne vektory;
- aké sú vlastnosti kolineárnych vektorov;
- aká je lineárna závislosť kolineárnych vektorov.
Kolineárne vektory sú vektory, ktoré sú rovnobežné s rovnakou čiarou alebo ležia na tej istej čiare.
Príklad 1
Podmienky pre kolineárne vektory
Dva vektory sú kolineárne, ak je splnená niektorá z nasledujúcich podmienok:
- podmienka 1 . Vektory a a b sú kolineárne, ak existuje číslo λ také, že a = λ b ;
- podmienka 2 . Vektory a a b sú kolineárne s rovnakým pomerom súradníc:
a = (a 1 ; a 2) , b = (b 1 ; b 2) ⇒ a ∥ b ⇔ a 1 b 1 = a 2 b 2
- stav 3 . Vektory a a b sú kolineárne za predpokladu, že vektorový súčin a nulový vektor sú rovnaké:
a ∥ b ⇔ a, b = 0
Poznámka 1
Podmienka 2 nepoužiteľné, ak je jedna z vektorových súradníc nula.
Poznámka 2
Podmienka 3 použiteľné len pre tie vektory, ktoré sú dané v priestore.
Príklady úloh na štúdium kolinearity vektorov
Príklad 1Skúmame kolinearitu vektorov a \u003d (1; 3) a b \u003d (2; 1).
Ako sa rozhodnúť?
V tomto prípade je potrebné použiť 2. podmienku kolinearity. Pre dané vektory to vyzerá takto:
Rovnosť je nesprávna. Z toho môžeme usúdiť, že vektory a a b sú nekolineárne.
Odpoveď : a | | b
Príklad 2
Aká hodnota m vektora a = (1 ; 2) a b = (- 1 ; m) je potrebná, aby vektory boli kolineárne?
Ako sa rozhodnúť?
Pomocou druhej kolineárnej podmienky budú vektory kolineárne, ak sú ich súradnice proporcionálne:
To ukazuje, že m = -2.
odpoveď: m = -2.
Kritériá lineárnej závislosti a lineárnej nezávislosti sústav vektorov
VetaSystém vektorov vo vektorovom priestore je lineárne závislý iba vtedy, ak jeden z vektorov systému možno vyjadriť v podmienkach zvyšku vektorov systému.
Dôkaz
Nech je sústava e 1 , e 2 , . . . , e n je lineárne závislá. Zapíšme si lineárnu kombináciu tohto systému rovnajúcu sa nulovému vektoru:
a 1 e 1 + a 2 e 2 +. . . + a n e n = 0
v ktorých sa aspoň jeden z koeficientov kombinácie nerovná nule.
Nech a k ≠ 0 k ∈ 1 , 2 , . . . , n .
Obidve strany rovnosti delíme nenulovým koeficientom:
a k - 1 (ak - 1 a 1) e1 + (ak - 1 a k) ek +. . . + (ak - 1 a n) e n = 0
Označiť:
Ak - 1 a m , kde m ∈ 1 , 2 , . . . , k - 1 , k + 1 , n
V tomto prípade:
p1e1+. . . + pk - 1 ek - 1 + p k + 1 ek + 1 + . . . + n e n = 0
alebo ek = (-p1)e1+. . . + (- p k - 1) ek - 1 + (- p k + 1) ek + 1 +. . . + (- β n) a n
Z toho vyplýva, že jeden z vektorov systému je vyjadrený v podmienkach všetkých ostatných vektorov systému. Čo bolo potrebné preukázať (p.t.d.).
Primeranosť
Nech je jeden z vektorov lineárne vyjadrený v podmienkach všetkých ostatných vektorov systému:
ek = y1e1+. . . + y k - 1 ek - 1 + y k + 1 ek + 1 +. . . + γ n e n
Vektor e k prenesieme na pravú stranu tejto rovnosti:
0 = y1e1+. . . + y k - 1 ek - 1 - ek + y k + 1 ek + 1 + . . . + γ n e n
Keďže koeficient vektora e k je rovný - 1 ≠ 0, dostaneme netriviálne zobrazenie nuly systémom vektorov e 1 , e 2 , . . . , e n , a to zase znamená, že daný systém vektorov je lineárne závislý. Čo bolo potrebné preukázať (p.t.d.).
Dôsledok:
- Systém vektorov je lineárne nezávislý, keď žiadny z jeho vektorov nemôže byť vyjadrený v podmienkach všetkých ostatných vektorov systému.
- Vektorový systém, ktorý obsahuje nulový vektor alebo dva rovnaké vektory, je lineárne závislý.
Vlastnosti lineárne závislých vektorov
- Pre 2- a 3-rozmerné vektory je podmienka splnená: dva lineárne závislé vektory sú kolineárne. Dva kolineárne vektory sú lineárne závislé.
- Pre 3-rozmerné vektory je podmienka splnená: tri lineárne závislé vektory sú koplanárne. (3 koplanárne vektory - lineárne závislé).
- Pre n-rozmerné vektory je splnená podmienka: n + 1 vektorov je vždy lineárne závislých.
Príklady riešenia úloh pre lineárnu závislosť alebo lineárnu nezávislosť vektorov
Príklad 3Skontrolujme vektory a = 3 , 4 , 5 , b = - 3 , 0 , 5 , c = 4 , 4 , 4 , d = 3 , 4 , 0 pre lineárnu nezávislosť.
Riešenie. Vektory sú lineárne závislé, pretože rozmer vektorov je menší ako počet vektorov.
Príklad 4
Skontrolujme vektory a = 1 , 1 , 1 , b = 1 , 2 , 0 , c = 0 , - 1 , 1 pre lineárnu nezávislosť.
Riešenie. Nájdeme hodnoty koeficientov, pri ktorých sa lineárna kombinácia bude rovnať nulovému vektoru:
x 1 a + x 2 b + x 3 c 1 = 0
Vektorovú rovnicu napíšeme vo forme lineárnej rovnice:
x 1 + x 2 = 0 x 1 + 2 x 2 - x 3 = 0 x 1 + x 3 = 0
Tento systém riešime Gaussovou metódou:
1 1 0 | 0 1 2 - 1 | 0 1 0 1 | 0 ~
Od 2. riadku odčítame 1., od 3. - 1.:
~ 1 1 0 | 0 1 - 1 2 - 1 - 1 - 0 | 0 - 0 1 - 1 0 - 1 1 - 0 | 0 - 0 ~ 1 1 0 | 0 0 1 - 1 | 0 0 - 1 1 | 0 ~
Odčítajte 2. od 1. riadku, pripočítajte 2. k 3.:
~ 1 - 0 1 - 1 0 - (- 1) | 0 - 0 0 1 - 1 | 0 0 + 0 - 1 + 1 1 + (- 1) | 0 + 0 ~ 0 1 0 | 1 0 1 - 1 | 0 0 0 0 | 0
Z riešenia vyplýva, že systém má veľa riešení. To znamená, že existuje nenulová kombinácia hodnôt takých čísel x 1 , x 2 , x 3, pre ktoré sa lineárna kombinácia a , b , c rovná nulovému vektoru. Preto vektory a , b , c sú lineárne závislé.
Ak si všimnete chybu v texte, zvýraznite ju a stlačte Ctrl+Enter
Vektory, ich vlastnosti a pôsobenie s nimi
Vektory, akcie s vektormi, lineárny vektorový priestor.
Vektory sú usporiadanou kolekciou konečného počtu reálnych čísel.
Akcie: 1. Násobenie vektora číslom: lambda * vektor x \u003d (lamda * x 1, lambda * x 2 ... lambda * x n). (3,4, 0, 7) * 3 \u003d (9, 12,0,21 )
2. Sčítanie vektorov (patria do rovnakého vektorového priestoru) vektor x + vektor y \u003d (x 1 + y 1, x 2 + y 2, ... x n + y n,)
3. Vektor 0=(0,0…0)---n E n – n-rozmerný (lineárny priestor) vektor x + vektor 0 = vektor x
Veta. Aby bol systém n vektorov v n-rozmernom lineárnom priestore lineárne závislý, je potrebné a postačujúce, aby jeden z vektorov bol lineárnou kombináciou ostatných.
Veta. Ľubovoľná množina n+ 1. vektor n-rozmerného lineárneho priestoru yavl. lineárne závislé.
Sčítanie vektorov, násobenie vektorov číslami. Odčítanie vektorov.
Súčet dvoch vektorov je vektor smerujúci od začiatku vektora po koniec vektora za predpokladu, že začiatok sa zhoduje s koncom vektora. Ak sú vektory dané ich expanziami z hľadiska základných vektorov, potom sčítanie vektorov spočítava ich zodpovedajúce súradnice.
Zoberme si to na príklade karteziánskeho súradnicového systému. Nechaj
Ukážme to

To ukazuje obrázok 3 ![]()

Súčet ľubovoľného konečného počtu vektorov zistíme pomocou pravidla mnohouholníka (obr. 4): na zostrojenie súčtu konečného počtu vektorov stačí porovnať začiatok každého nasledujúceho vektora s koncom predchádzajúceho vektora. a zostrojte vektor spájajúci začiatok prvého vektora s koncom posledného.

Vlastnosti operácie sčítania vektorov:
V týchto výrazoch m, n sú čísla.
Rozdiel vektorov sa nazýva vektor. Druhý člen je vektor opačný k vektoru v smere, ale jeho dĺžka je rovnaká.

Operácia odčítania vektora je teda nahradená operáciou sčítania
Vektor, ktorého začiatok je v počiatku súradníc a koniec v bode A (x1, y1, z1), sa nazýva vektor polomeru bodu A a označuje sa alebo jednoducho. Keďže jeho súradnice sa zhodujú so súradnicami bodu A, jeho rozšírenie z hľadiska vektorov má tvar

Vektor začínajúci v bode A(x1, y1, z1) a končiaci v bode B(x2, y2, z2) možno zapísať ako ![]()
kde r2 je vektor polomeru bodu B; r 1 - vektor polomeru bodu A.
Preto expanzia vektora z hľadiska orts má tvar
Jeho dĺžka sa rovná vzdialenosti medzi bodmi A a B
NÁSOBENIE
Takže v prípade plochej úlohy sa súčin vektora pomocou a = (ax; ay) a čísla b nájde podľa vzorca
a b = (ax b; ay b)
Príklad 1. Nájdite súčin vektora a = (1; 2) x 3.
3a = (3 1; 3 2) = (3; 6)
Takže v prípade priestorového problému sa súčin vektora a = (ax; ay; az) a čísla b nájde podľa vzorca
a b = (ax b; ay b; az b)
Príklad 1. Nájdite súčin vektora a = (1; 2; -5) krát 2.
2a = (2 1; 2 2; 2 (-5)) = (2; 4; -10)
Bodový súčin vektorov a ![]() kde je uhol medzi vektormi a ; ak buď, tak
kde je uhol medzi vektormi a ; ak buď, tak
Z definície skalárneho súčinu vyplýva, že ![]()
kde je napríklad hodnota priemetu vektora do smeru vektora .
Skalárny štvorec vektora:
Vlastnosti bodového produktu:
![]()
![]()
![]()
![]()
Bodový súčin v súradniciach
Ak ![]()
![]() To
To ![]()
Uhol medzi vektormi
Uhol medzi vektormi - uhol medzi smermi týchto vektorov (najmenší uhol).
Vektorový súčin (vektorový súčin dvoch vektorov.)- je pseudovektor kolmý na rovinu skonštruovaný dvoma faktormi, ktorý je výsledkom binárnej operácie "vektorové násobenie" na vektoroch v trojrozmernom euklidovskom priestore. Súčin nie je komutatívny ani asociatívny (je antikomutatívny) a líši sa od bodového súčinu vektorov. V mnohých inžinierskych a fyzikálnych problémoch je potrebné vedieť postaviť vektor kolmý na dva existujúce - vektorový súčin túto možnosť poskytuje. Krížový súčin je užitočný na „meranie“ kolmosti vektorov – dĺžka krížového súčinu dvoch vektorov sa rovná súčinu ich dĺžok, ak sú kolmé, a klesá na nulu, ak sú vektory rovnobežné alebo antiparalelné.
Vektorový súčin je definovaný iba v trojrozmerných a sedemrozmerných priestoroch. Výsledok vektorového súčinu, podobne ako skalárny súčin, závisí od metriky euklidovského priestoru.
Na rozdiel od vzorca na výpočet skalárneho súčinu zo súradníc vektorov v trojrozmernom pravouhlom súradnicovom systéme, vzorec pre vektorový súčin závisí od orientácie pravouhlého súradnicového systému alebo, inými slovami, jeho „chirality“
Kolinearita vektorov.
Dva nenulové (nerovnajúce sa 0) vektory sa nazývajú kolineárne, ak ležia na rovnobežných priamkach alebo na tej istej priamke. Synonymum je prijateľné, ale neodporúča sa – „paralelné“ vektory. Kolineárne vektory môžu byť nasmerované rovnakým smerom („spolu-riadené“) alebo opačne (v druhom prípade sa niekedy nazývajú „antikolineárne“ alebo „antiparalelné“).
Zmiešaný súčin vektorov( a,b,c)- skalárny súčin vektora a a vektorový súčin vektorov b a c:
(a,b,c)=a ⋅(b×c)
niekedy sa mu hovorí trojitý skalárny súčin vektorov, zrejme kvôli tomu, že výsledkom je skalár (presnejšie pseudoskalár).
Geometrický význam: Modul zmiešaného produktu sa číselne rovná objemu kvádra tvoreného vektormi (a,b,c) .
Vlastnosti
Zmiešaný produkt je šikmo symetrický vzhľadom na všetky jeho argumenty: tj. e) permutácia akýchkoľvek dvoch faktorov mení znamienko produktu. Z toho vyplýva, že zmiešaný súčin v pravom karteziánskom súradnicovom systéme (na ortonormálnom základe) sa rovná determinantu matice zloženej z vektorov a:
Zmiešaný súčin v ľavom karteziánskom súradnicovom systéme (na ortonormálnom základe) sa rovná determinantu matice zloženej z vektorov a branej so znamienkom mínus:
najmä
Ak sú akékoľvek dva vektory rovnobežné, potom s ktorýmkoľvek tretím vektorom tvoria zmiešaný produkt rovný nule.
Ak sú tri vektory lineárne závislé (t. j. koplanárne, ležia v rovnakej rovine), ich zmiešaný súčin je nula.
Geometrický význam - Zmiešaný produkt v absolútnej hodnote sa rovná objemu kvádra (pozri obrázok) tvoreného vektormi a; znamienko závisí od toho, či je táto trojica vektorov pravá alebo ľavá.
Komplanarita vektorov.
Tri vektory (alebo viac) sa nazývajú koplanárne, ak sú zredukované na spoločný počiatok a ležia v rovnakej rovine
Porovnateľné vlastnosti
Ak je aspoň jeden z troch vektorov nula, potom sa tieto tri vektory tiež považujú za koplanárne.
Trojica vektorov obsahujúcich pár kolineárnych vektorov je koplanárna.
Zmiešaný súčin koplanárnych vektorov. Toto je kritérium pre koplanaritu troch vektorov.
Koplanárne vektory sú lineárne závislé. Toto je tiež kritérium koplanarity.
V 3-rozmernom priestore tvoria základ 3 nekoplanárne vektory
Lineárne závislé a lineárne nezávislé vektory.
Lineárne závislé a nezávislé systémy vektorov.Definícia. Systém vektorov je tzv lineárne závislé, ak existuje aspoň jedna netriviálna lineárna kombinácia týchto vektorov rovná nulovému vektoru. V opačnom prípade, t.j. ak sa len triviálna lineárna kombinácia daných vektorov rovná nulovému vektoru, volajú sa vektory lineárne nezávislé.
Veta (kritérium lineárnej závislosti). Aby bol systém vektorov v lineárnom priestore lineárne závislý, je potrebné a postačujúce, aby aspoň jeden z týchto vektorov bol lineárnou kombináciou ostatných.
1) Ak je medzi vektormi aspoň jeden nulový vektor, potom je celý systém vektorov lineárne závislý.
V skutočnosti, ak napríklad , potom za predpokladu, že máme netriviálnu lineárnu kombináciu .▲
2) Ak niektoré z vektorov tvoria lineárne závislý systém, potom je lineárne závislý celý systém.
V skutočnosti nech sú vektory , , lineárne závislé. Existuje teda netriviálna lineárna kombinácia rovnajúca sa nulovému vektoru. Ale potom, za predpokladu ![]() , získame aj netriviálnu lineárnu kombináciu rovnajúcu sa nulovému vektoru.
, získame aj netriviálnu lineárnu kombináciu rovnajúcu sa nulovému vektoru.
2. Základ a rozmer. Definícia. Systém lineárne nezávislých vektorov ![]() vektorový priestor sa nazýva základ tento priestor, ak sa dá ľubovoľný vektor z reprezentovať ako lineárna kombinácia vektorov tohto systému, t.j. pre každý vektor existujú reálne čísla
vektorový priestor sa nazýva základ tento priestor, ak sa dá ľubovoľný vektor z reprezentovať ako lineárna kombinácia vektorov tohto systému, t.j. pre každý vektor existujú reálne čísla ![]() taká, že platí rovnosť.Táto rovnosť sa nazýva vektorový rozklad podľa základu a čísel
taká, že platí rovnosť.Táto rovnosť sa nazýva vektorový rozklad podľa základu a čísel ![]() volal vektorové súradnice vzhľadom na základ(alebo v základe) .
volal vektorové súradnice vzhľadom na základ(alebo v základe) .
Veta (o jedinečnosti expanzie z hľadiska základne). Každý priestorový vektor je možné rozšíriť z hľadiska základu jedinečným spôsobom, t.j. súradnice každého vektora v základe sú definované jednoznačne.
Nami predstavené lineárne operácie s vektormi umožňujú vytvárať rôzne výrazy pre vektorové veličiny a transformovať ich pomocou vlastností nastavených pre tieto operácie.
Na základe danej množiny vektorov a 1 , ... a n môžete zostaviť výraz v tvare
kde a 1 , ... a n sú ľubovoľné reálne čísla. Tento výraz sa nazýva lineárna kombinácia vektorov a 1, ..., a n . Čísla α i , i = 1, n , sú lineárne kombinačné koeficienty. Súbor vektorov je tiež tzv vektorový systém.
V súvislosti so zavedeným pojmom lineárna kombinácia vektorov vzniká problém opísať množinu vektorov, ktoré možno zapísať ako lineárnu kombináciu daného systému vektorov a 1 , ..., a n . Okrem toho sú prirodzené otázky o podmienkach, za ktorých existuje zobrazenie vektora vo forme lineárnej kombinácie, a o jedinečnosti takéhoto zobrazenia.
Definícia 2.1. Volajú sa vektory a 1 , ... a n lineárne závislé, ak existuje taká množina koeficientov α 1 , ... , α n , že
α 1 a 1 + ... + α n a n = 0 (2.2)
a aspoň jeden z týchto koeficientov je nenulový. Ak zadaná množina koeficientov neexistuje, zavolajú sa vektory lineárne nezávislé.
Ak α 1 = ... = α n = 0, potom α 1 a 1 + ... + α n a n = 0. S ohľadom na to môžeme povedať toto: vektory a 1 , ... a n sú lineárne nezávislé, ak z rovnosti (2.2) vyplýva, že všetky koeficienty α 1 , ... , α n sú rovné nule.
Nasledujúca veta vysvetľuje, prečo sa nový koncept nazýva „závislosť“ (alebo „nezávislosť“), a poskytuje jednoduché kritérium pre lineárnu závislosť.
Veta 2.1. Aby vektory a 1 , ..., an , n > 1 boli lineárne závislé, je potrebné a postačujúce, aby jeden z nich bol lineárnou kombináciou ostatných.
◄ Nevyhnutnosť. Predpokladajme, že vektory a 1 , ... a n sú lineárne závislé. Podľa definície 2.1 lineárnej závislosti je v rovnosti (2.2) vľavo aspoň jeden nenulový koeficient, napríklad α 1 . Prvý člen necháme na ľavej strane rovnosti, zvyšok presunieme na pravú stranu, pričom ich znamienka zmeníme ako obvykle. Vydelením výslednej rovnosti α 1 dostaneme
a 1 =-α 2 /α 1 ⋅ a 2 - ... - α n / α 1 ⋅ a n
tie. reprezentácia vektora a 1 ako lineárna kombinácia zostávajúcich vektorov a 2, ..., an.
Primeranosť. Nech je napríklad prvý vektor a 1 reprezentovaný ako lineárna kombinácia zostávajúcich vektorov: a 1 = β 2 a 2 + ... + β n a n . Prenesením všetkých členov z pravej strany na ľavú dostaneme a 1 - β 2 a 2 - ... - β n a n = 0, t.j. lineárna kombinácia vektorov a 1, ..., a n s koeficientmi α 1 = 1, α 2 = - β 2, ..., α n = - β n, rovnými nulový vektor. V tejto lineárnej kombinácii nie sú všetky koeficienty rovné nule. Podľa definície 2.1 sú vektory a 1 , ... a n lineárne závislé.
Definícia a kritérium lineárnej závislosti sú formulované tak, že implikujú prítomnosť dvoch alebo viacerých vektorov. Dá sa však hovoriť aj o lineárnej závislosti jedného vektora. Aby sme si túto možnosť uvedomili, namiesto „vektory sú lineárne závislé“ musíme povedať „systém vektorov je lineárne závislý“. Je ľahké vidieť, že výraz „systém jedného vektora je lineárne závislý“ znamená, že tento jediný vektor je nula (v lineárnej kombinácii je len jeden koeficient a ten sa nesmie rovnať nule).
Koncept lineárnej závislosti má jednoduchú geometrickú interpretáciu. Tento výklad objasňujú nasledujúce tri tvrdenia.
Veta 2.2. Dva vektory sú lineárne závislé práve vtedy, ak áno kolineárne.
◄ Ak sú vektory a a b lineárne závislé, potom jeden z nich, napríklad a, je vyjadrený cez druhý, t.j. a = λb pre nejaké reálne číslo λ. Podľa definície 1.7 Tvorba vektory číslom, vektory a a b sú kolineárne.
Teraz nech sú vektory a a b kolineárne. Ak sú obe nulové, potom je zrejmé, že sú lineárne závislé, pretože každá ich lineárna kombinácia sa rovná nulovému vektoru. Nech sa jeden z týchto vektorov nerovná 0, napríklad vektor b. Označme λ pomer dĺžok vektorov: λ = |а|/|b|. Kolineárne vektory môžu byť jednosmerný alebo opačných smeroch. V druhom prípade zmeníme znamienko λ. Potom pri kontrole Definície 1.7 vidíme, že a = λb. Podľa vety 2.1 sú vektory a a b lineárne závislé.
Poznámka 2.1. V prípade dvoch vektorov, berúc do úvahy kritérium lineárnej závislosti, možno dokázanú vetu preformulovať takto: dva vektory sú kolineárne vtedy a len vtedy, ak je jeden z nich reprezentovaný ako súčin druhého číslom. Toto je vhodné kritérium pre kolinearitu dvoch vektorov.
Veta 2.3. Tri vektory sú lineárne závislé práve vtedy, ak áno koplanárny.
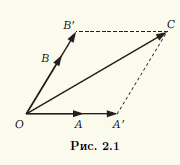
◄ Ak sú tri vektory a, b, c lineárne závislé, potom podľa vety 2.1 jeden z nich, napríklad a, je lineárnou kombináciou ostatných: a = βb + γc. Spojme počiatky vektorov b a c v bode A. Potom budú mať vektory βb, γc spoločný počiatok v bode A a paralelogramové pravidlo ich súčet, tie. vektor a, bude vektor so začiatkom A a koniec, čo je vrchol rovnobežníka postaveného na sčítacích vektoroch. Všetky vektory teda ležia v rovnakej rovine, to znamená, že sú koplanárne.
Nech vektory a, b, c sú koplanárne. Ak je jeden z týchto vektorov nulový, potom je zrejmé, že pôjde o lineárnu kombináciu ostatných. Stačí, ak sa všetky koeficienty lineárnej kombinácie rovnajú nule. Preto môžeme predpokladať, že všetky tri vektory nie sú nulové. Kompatibilné začať tieto vektory v spoločnom bode O. Nech sú ich koncami body A, B, C (obr. 2.1). Nakreslite čiary cez bod C rovnobežné s čiarami prechádzajúcimi cez dvojice bodov O, A a O, B. Priesečníky označíme A" a B", dostaneme rovnobežník OA"CB", teda OC" = OA" + OB ". Vektor OA" a nenulový vektor a= OA sú kolineárne, a preto prvý z nich možno získať vynásobením druhého reálnym číslom α:OA" = αOA . Podobne OB" = βOB , β ∈ R. Výsledkom je, že OC" = α OA + βOB , teda vektor c je lineárnou kombináciou vektorov a a b. Podľa vety 2.1 sú vektory a, b, c lineárne závislé.
Veta 2.4. Akékoľvek štyri vektory sú lineárne závislé.
◄ Dôkaz sa riadi rovnakou schémou ako vo vete 2.3. Uvažujme ľubovoľné štyri vektory a, b, c a d. Ak je jeden zo štyroch vektorov nula, alebo sú medzi nimi dva kolineárne vektory, alebo tri zo štyroch vektorov sú koplanárne, potom sú tieto štyri vektory lineárne závislé. Napríklad, ak sú vektory a a b kolineárne, potom môžeme zostaviť ich lineárnu kombináciu αa + βb = 0 s nenulovými koeficientmi a potom pridať zvyšné dva vektory k tejto kombinácii, pričom ako koeficienty vezmeme nuly. Dostaneme lineárnu kombináciu štyroch vektorov rovných 0, v ktorej sú nenulové koeficienty.
Môžeme teda predpokladať, že medzi vybranými štyrmi vektormi nie sú žiadne nulové vektory, žiadne dva nie sú kolineárne a žiadne tri nie sú koplanárne. Za ich spoločný začiatok zvolíme bod O. Potom koncami vektorov a, b, c, d budú nejaké body A, B, C, D (obr. 2.2). Cez bod D nakreslíme tri roviny rovnobežné s rovinami ОВС, OCA, OAB, pričom A", B", С" sú priesečníky týchto rovín s priamkami OA, OB, OS. Dostaneme rovnobežnosten OA"C"B"C" B"DA", a vektory a,b,c ležia na jeho okrajoch vychádzajúcich z vrcholu O. Keďže štvoruholník OC"DC" je rovnobežník, potom OD = OC" + OC Segment OS" je zase diagonálny rovnobežník OA"C"B", takže OC" = OA" + OB" a OD = OA" + OB" + OC" .
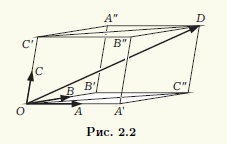
Zostáva poznamenať, že dvojice vektorov OA ≠ 0 a OA" , OB ≠ 0 a OB" , OC ≠ 0 a OC" sú kolineárne, a preto môžeme zvoliť koeficienty α, β, γ tak, aby OA" = aOA, OB" = pOB a OC" = yOC. Nakoniec dostaneme OD = αOA + βOB + γOC . V dôsledku toho je vektor OD vyjadrený v termínoch zostávajúcich troch vektorov a všetky štyri vektory sú podľa vety 2.1 lineárne závislé.
Definícia 1. Systém vektorov sa nazýva lineárne závislý, ak jeden z vektorov systému môže byť reprezentovaný ako lineárna kombinácia iné vektory systému a lineárne nezávislé - inak.
Definícia 1´. Systém vektorov sa nazýva lineárne závislý, ak existujú čísla s 1 , s 2 , …, s k , nie všetky rovné nule, takže lineárna kombinácia vektorov s danými koeficientmi sa rovná nulovému vektoru: = , inak sa systém nazýva lineárne nezávislý.
Ukážme, že tieto definície sú ekvivalentné.
Nech je splnená definícia 1, t.j. jeden z vektorov systému sa rovná lineárnej kombinácii zvyšku:
Lineárna kombinácia sústavy vektorov sa rovná nulovému vektoru a nie všetky koeficienty tejto kombinácie sa rovnajú nule, t.j. platí definícia 1´.
Nech je splnená definícia 1´. Lineárna kombinácia systému vektorov je , a nie všetky koeficienty kombinácie sa rovnajú nule, napríklad koeficienty vektora .
Jeden z vektorov sústavy sme prezentovali ako lineárnu kombináciu zvyšku, t.j. definícia 1 je splnená.
Definícia 2. Jednotkový vektor alebo ort sa nazýva n-rozmerný vektor , ktorý i Súradnica sa rovná jednej a zvyšok je nula.
. (1, 0, 0, …, 0),
(0, 1, 0, …, 0),
(0, 0, 0, …, 1).
Veta 1. Rôzne jednotkové vektory n-rozmerný priestor sú lineárne nezávislé.
Dôkaz. Nech sa lineárna kombinácia týchto vektorov s ľubovoľnými koeficientmi rovná nulovému vektoru.
Z tejto rovnosti vyplýva, že všetky koeficienty sú rovné nule. Máme rozpor.
Každý vektor n-rozmerný priestor ā (A 1 , A 2 , ..., A n ) môže byť reprezentované ako lineárna kombinácia jednotkových vektorov s koeficientmi rovnými súradniciam vektora
Veta 2. Ak systém vektorov obsahuje nulový vektor, potom je lineárne závislý.
Dôkaz. Nech je daný systém vektorov a jeden z vektorov je nula, napríklad = . Potom s vektormi tohto systému je možné zostaviť lineárnu kombináciu rovnú nulovému vektoru a nie všetky koeficienty budú nulové:
Preto je systém lineárne závislý.
Veta 3. Ak je niektorý podsystém systému vektorov lineárne závislý, potom je lineárne závislý celý systém.
Dôkaz. Daný systém vektorov . Predpokladajme, že systém je lineárne závislý, t.j. sú tam čísla s 1 , s 2 , …, s r , nie všetky sa rovnajú nule, takže = . Potom
Ukázalo sa, že lineárna kombinácia vektorov celého systému je rovnaká a nie všetky koeficienty tejto kombinácie sú rovné nule. Preto je systém vektorov lineárne závislý.
Dôsledok. Ak je systém vektorov lineárne nezávislý, potom ktorýkoľvek z jeho podsystémov je tiež lineárne nezávislý.
Dôkaz.
Predpokladajme opak, t.j. niektorý subsystém je lineárne závislý. Z vety vyplýva, že celý systém je lineárne závislý. Dostali sme sa do rozporu.
Veta 4 (Steinitzova veta). Ak je každý z vektorov lineárnou kombináciou vektorov a m>n, potom je systém vektorov lineárne závislý.
Dôsledok. V žiadnom systéme n-rozmerných vektorov nemôže byť viac ako n lineárne nezávislých vektorov.
Dôkaz. Každý n-rozmerný vektor je vyjadrený ako lineárna kombinácia n jednotkových vektorov. Ak teda systém obsahuje m vektory a m>n, potom podľa vety je tento systém lineárne závislý.



