mișcarea unui corp rigid, ca și mișcarea unui punct, poate fi complexă.
Lăsați corpul să facă o mișcare în raport cu sistemul de coordonate 0 X 1 y 1 z 1, care, la rândul său, se deplasează în raport cu axele fixe 0 xyz.Relativ mișcarea unui corp este mișcarea sa față de sistemul de coordonate în mișcare 0 X 1 y 1 z 1 . A descoperi portabil Mișcarea corpului în fiecare moment de timp ar trebui considerată ca fiind atașată rigid de cadrul de referință în mișcare, iar mișcarea pe care o va face corpul cu cadrul de referință în mișcare în raport cu cadrul fix va fi mișcare portabilă. Se numește mișcarea unui corp față de un sistem de coordonate fix absolut.
Sarcina principală a cinematicii mișcării complexe a unui corp rigid este de a stabili relații între caracteristicile cinematice ale mișcării absolute, relative și de translație. Mișcarea complexă a unui corp rigid poate consta în mișcări de translație și rotație sau poate fi obținută prin adăugarea mișcărilor de translație și rotație. În unele probleme de cinematică, o mișcare complexă dată a unui corp rigid este descompusă în componente ale mișcării (analiza); în altele, se cere determinarea unei mișcări complexe ca urmare a adăugării celor mai simple (sinteză). Atât în analiza, cât și în sinteza mișcărilor vorbim despre descompunerea și adăugarea mișcărilor considerate la un moment dat (mișcări instantanee).
Adăugarea mișcărilor de translație ale unui corp rigid
Lăsați un corp rigid să participe simultan la două mișcări de translație instantanee, dintre care una este de translație cu o viteză v 1, al doilea - portabil cu viteză v 2 (Figura 2.73). Să alegem un punct M corpuri. Să găsim viteza absolută a punctului M
v A = v r + v e = v 1 + v 2 . (2.113)
Deoarece atât mișcarea relativă, cât și cea portabilă a unui corp rigid sunt translaționale instantanee, viteza relativă, portabilă și, prin urmare, conform formulei (2.113), vitezele absolute ale tuturor punctelor corpului vor fi egale între ele în fiecare moment de timp. (egale ca mărime și paralele ca direcție) , i.e. mișcarea absolută a unui corp este, de asemenea, instantaneu de translație.
Evident, această concluzie este aplicabilă mișcării complexe a unui corp rigid, constând din trei sau mai multe mișcări de translație instantanee, apoi în cazul general
Deci, ca rezultat al adunării mișcărilor de translație instantanee ale unui corp rigid, mișcarea rezultată este instantaneu de translație.
cometariu. Mișcarea de translație instantanee a unui corp rigid diferă de mișcarea de translație prin aceea că, cu mișcarea de translație în fiecare moment de timp, vitezele și accelerațiile tuturor punctelor corpului sunt egale, iar cu mișcarea de translație instantanee la un moment dat de timp numai vitezele tuturor punctele corpului sunt egale.
66, 67 Adăugarea rotațiilor în jurul axelor paralele
Să luăm în considerare cazul când mișcarea relativă a corpului este rotația
cu viteza unghiulara in jurul unei axe fixate pe manivela (Fig. 1a), si portabila - prin rotirea manivelei in jurul unei axe paralele cu , cu viteza unghiulara . Atunci mișcarea corpului va fi plan-paralelă față de planul perpendicular pe axele.
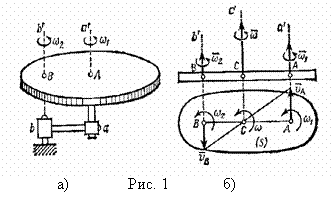
Să presupunem că rotațiile sunt direcționate într-o singură direcție. Să descriem secțiunea transversală a corpului cu un plan perpendicular pe axele (fig. 1 b). Urmele axelor din secțiune vor fi notate cu literele și . Apoi și. În acest caz, vectorii sunt paraleli între ei, perpendiculari și direcționați în direcții diferite. Atunci punctul este centrul instantaneu al vitezelor și, prin urmare, axa paralelă cu axele și este axa instantanee de rotație. Pentru a determina viteza unghiulară a rotației absolute a unui corp în jurul unei axe și poziția axei în sine, i.e. puncte, vom folosi proprietatea centrului de viteză instantanee
![]() .
.
Înlocuind valorile și în aceste egalități, obținem în sfârșit
Deci, la adăugarea a două rotații direcționate în aceeași direcție în jurul axelor paralele, mișcarea rezultată a corpului va fi rotație instantanee cu viteză absolută în jurul axei instantanee paralele cu datele, a cărei poziție este determinată de proporții (2).
În timp, axa instantanee de rotație își schimbă poziția, descriind o suprafață cilindrică.

Să luăm acum în considerare cazul când rotațiile sunt direcționate în direcții diferite (Fig. 2).
Să presupunem că. Apoi, raționând ca în cazul precedent, pentru viteza unghiulară a mișcării absolute a unui corp în jurul unei axe și poziția axei în sine, obținem
Astfel, la adăugarea a două rotații direcționate în direcții diferite în jurul axelor paralele, mișcarea rezultată a corpului va fi rotație instantanee cu viteză unghiulară absolută în jurul axei instantanee, a cărei poziție este determinată de proporții (4).
Rețineți că în acest caz punctul împarte distanța dintre axele paralele în exterior.
Să luăm în considerare un caz special când rotațiile în jurul axelor paralele sunt direcționate în direcții diferite, dar în valoare absolută (Fig. 3).

Un astfel de set de rotații se numește pereche de rotații, iar vectorii formează o pereche de viteze unghiulare. În acest caz obținem și , adică = . Atunci centrul instantaneu de viteze este la infinit și toate punctele corpului la un moment dat de timp au aceleași viteze.
În consecință, mișcarea rezultată a corpului va fi o mișcare de translație (sau de translație instantanee) cu o viteză egală numeric și direcționată perpendicular pe planul care trece prin vectorii și . Astfel, o pereche de rotații este echivalentă cu o mișcare de translație instantanee cu o viteză egală cu momentul unei perechi de viteze unghiulare ale acestor rotații.
Un exemplu de pereche de viteze unghiulare este mișcarea pedalei de bicicletă în raport cu cadrul bicicletei (Fig. 4).

Această mișcare este o combinație de rotație portabilă cu manivela în jurul axei și rotația relativă a pedalei în raport cu manivela în jurul axei. Pe durata întregii mișcări, pedala rămâne paralelă cu poziția inițială, adică. face mișcare înainte.
Să ne uităm la câteva exemple.
Exemplul 1. O manivela se rotește în jurul unei axe în sensul acelor de ceasornic cu o viteză unghiulară de , iar un disc cu rază se rotește în jurul unei axe în sensul acelor de ceasornic cu aceeași viteză unghiulară față de manivelă. Aflați mărimea și direcția vitezelor absolute ale punctelor și (Fig. 5).

Soluţie. Deoarece vitezele unghiulare ale rotațiilor portabile și relative sunt egale ca mărime și sunt direcționate în aceeași direcție, centrul de rotație instantaneu al discului se află la mijloc între și , i.e. ![]() . Mărimea vitezei unghiulare absolute de rotație a discului în jurul unui punct este egală cu . De aici găsim:
. Mărimea vitezei unghiulare absolute de rotație a discului în jurul unui punct este egală cu . De aici găsim:
![]() , ,
, ,
![]() , .
, .

Exemplul 2. Manivela se rotește în jurul unei axe cu viteza unghiulară . O roată dințată cu rază este montată lejer pe știftul manivelei și îmbinată cu un angrenaj cu rază staționară. Aflați viteza unghiulară absolută a angrenajului și viteza sa unghiulară în raport cu manivela (Fig. 6).
Soluţie. Deoarece treapta de viteză este cuplată cu o roată staționară, viteza absolută a punctului de angrenare a angrenajului cu această roată este zero, adică. punctul este centrul instantaneu de rotație al angrenajului. De aici ![]() sau ,
sau ,
Rețineți că sensul de rotație al angrenajului coincide cu sensul de rotație al manivelei.
Apoi găsim viteza unghiulară absolută a angrenajului din egalitate
Dacă un corp participă simultan la mișcarea de translație portabilă cu viteză și mișcarea relativă de rotație cu viteza unghiulară, atunci, în funcție de poziția lor relativă, este recomandabil să luăm în considerare trei cazuri separate.
1. Viteza de translație este perpendiculară pe axa de rotație relativă.În acest caz, vectorii și sunt perpendiculari (Fig. 53). Pe net OS, perpendicular pe planul în care sunt situate și, există un punct CU, a cărui viteză este zero. Determinați distanța acestuia față de punct DESPRE.
Conform teoremei adunării vitezelor pentru un punct CU avem
deoarece la rotirea în jurul unei axe
Ținând cont de faptul că vitezele și sunt opuse ca direcție, obținem
Din moment ce , atunci și, prin urmare, puncte CUȘi DESPRE sunt la distanta
Alte puncte cu viteze egale cu zero sunt situate pe o linie care trece prin punct CU, paralel cu axa de rotație a corpului cu viteza unghiulară. Astfel, există o axă instantanee de rotație paralelă cu axa de rotație relativă și care trece prin punct CU.
Când se adaugă mișcările de translație de translație și de rotație relative ale unui corp rigid, în care viteza mișcării de translație este perpendiculară pe axa de rotație relativă, mișcarea absolută echivalentă este rotația în jurul unei axe instantanee paralele cu axa de rotație relativă cu o viteză unghiulară. coincide cu viteza unghiulară a rotației relative.
2. Mișcare elicoidală. Mișcarea în care viteza mișcării de translație portabile a corpului este paralelă cu axa de rotație relativă se numește mișcare cu șurub a unui corp solid (Fig. 54). Axa de rotație a corpului în acest caz se numește axa de rotație. În mișcarea șurubului, corpul se mișcă translațional paralel cu axa mișcării șurubului și se rotește în jurul acestei axe. Mișcarea elicoială nu se reduce la nicio altă mișcare echivalentă simplă.
În timpul mișcării șuruburilor, vectorii și pot avea atât direcții identice, cât și opuse. Mișcarea șurubului unui corp este caracterizată de parametrul de mișcare anuală a șurubului, care este considerat a fi cantitatea . Dacă se modifică în timp, atunci parametrii mișcării șurubului sunt variabili. În cazul general, și, i.e. p este deplasarea corpului de-a lungul axei mișcării șurubului atunci când corpul este rotit cu un radian.
Pentru un punct M avem
Dar unde r– distanța punctului față de axa șurubului. Viteze și perpendiculare. Prin urmare,
Având în vedere asta, obținem
Dacă un corp se rotește cu o viteză unghiulară constantă și are o viteză de translație constantă, atunci o astfel de mișcare a corpului se numește mișcare constantă a elicei. În acest caz, punctul corpului în timpul mișcării este întotdeauna pe suprafața unui cilindru circular cu o rază r. Traiectoria unui punct este o spirală. Pe lângă parametrul în cazul în cauză, introduceți pasul elicei, adică distanța cu care orice punct al corpului se va deplasa în timpul unei revoluții a corpului în jurul axei mișcării șurubului. Unghiul de rotație al corpului la este calculat prin formula. Pentru o revoluție a corpului. Timpul necesar pentru aceasta.
Pe parcursul T punctul se va deplasa într-o direcție paralelă cu axa șurubului în funcție de pasul șurubului.
Din aceasta obținem dependența pasului elicei de parametrul de mișcare a șurubului.
Ecuațiile mișcării unui punct M corpurile de-a lungul unei spirale (Fig. 102) în coordonate carteziene sunt exprimate în următoarea formă:
În aceste ecuații mărimile și sunt constante.
3. Caz general. Fie ca viteza mișcării de translație portabilă și viteza unghiulară a rotației relative formează un unghi. Cazul când , și , au fost deja luate în considerare, au toate punctele corpului. Astfel, se obține o mișcare a șurubului cu o axă a șurubului distanțată de axa originală de rotație cu o cantitate.
Parametrul mișcării elicoidale rezultate.
Cazul general al mișcărilor portabile de translație și rotație relativă a unui corp rigid s-a dovedit a fi echivalent cu mișcarea instantanee a șurubului.
Detalii Categorie: Vizualizări: 975
MIȘCAREA șurubului. Dacă mișcarea unui sistem neschimbabil (de exemplu, un corp rigid) este compusă din rotație în jurul unei axe și mișcare de translație de-a lungul acestei axe, atunci o astfel de mișcare a corpului se numește mișcare elicoidală; această axă se numește axă elicoidală sau axă de rotație - alunecare. Dacă sunt date două poziții arbitrare ale unui corp care se mișcă în spațiu, atunci trecerea de la poziția I la II poate fi efectuată cu o mișcare elicoidală în jurul unei axe elicoidale situate în mod specific (teorema lui Chasles); în acest caz, mișcările de rotație și translație pot fi efectuate fie simultan, fie secvenţial în orice ordine. Considerând toată mișcarea dată a unui corp în spațiu ca fiind constând din mișcări elementare infinitezimale și aplicând teorema lui Chasles fiecăruia dintre ele, obținem următoarea propoziție: orice mișcare a unui corp în spațiu este o serie de mișcări elicoidale infinitezimale în jurul axelor elicoidale instantanee, schimbându-și poziția în fiecare moment și direcție în spațiu.
Deplasările elementare elicoidale ale corpului în jurul fiecărei axe instantanee sunt mișcări echivalente cu deplasări reale infinitezimale ale corpului și le reprezintă cu o precizie de mărimi infinitezimale de ordin superior. Legile mișcării șuruburilor, echivalente cu orice mișcare a unui corp rigid, au fost stabilite de Mozzi (Giulio Mozzi, 1768). Adăugarea a două mișcări elicoidale are ca rezultat și o mișcare elicoidală.
Să luăm în considerare mișcarea complexă a unui corp rigid, constând din mișcări de translație și rotație. Un exemplu corespunzător este prezentat în Fig. 78. Aici mişcarea relativă a corpului 1 este rotația cu viteză unghiulară în jurul unei axe Ahh, fixat pe o platformă 2, și mișcarea portabil-translațională a platformei la o viteză de . În același timp, roata participă și la două astfel de mișcări. 3, pentru care mișcarea relativă este rotația în jurul axei sale, iar mișcarea portabilă este mișcarea aceleiași platforme. În funcție de valoarea unghiului α dintre vectori și (pentru o roată acest unghi este de 90°), aici sunt posibile trei cazuri.
1. Viteza de translație este perpendiculară pe axa de rotație ( ). Fie ca mișcarea complexă a unui corp să fie compusă din mișcare de rotație în jurul unei axe Ahh cu viteză unghiulară ω şi mişcare de translaţie cu viteză perpendiculară (Fig. 79). Este evident că această mișcare este (relativă la avion P, perpendicular pe ax Ahh)miscare plan-paralela.
Dacă numări punctul A pol, atunci mișcarea luată în considerare, ca orice mișcare plan-paralelă, va fi de fapt compusă din mișcare de translație cu viteza , adică cu viteza polului și mișcare de rotație în jurul axei Ahh trecând prin stâlp.
Vectorul, conform Secțiunii 6.2, poate fi înlocuit cu o pereche de viteze unghiulare și, luând , și . În acest caz, distanța AR se va determina din egalitate, de unde .
Vectorii și dau zero atunci când se adaugă și, prin urmare, mișcarea corpului în acest caz poate fi considerată ca rotație instantanee în jurul unei axe RR cu viteza unghiulara. Astfel, rotația corpului în jurul axelor AhhȘi RR are loc la aceeași viteză unghiulară, adică partea de rotație a mișcării nu depinde de alegerea polului.
2. Mișcarea șuruburilor ( ). Dacă mișcarea complexă a unui corp constă dintr-o mișcare de rotație în jurul unei axe Ahh cu viteza unghiulara si translatia cu viteza indreptata paralel cu axa Ahh(Fig. 80), atunci se numește o astfel de mișcare a corpului şurub. Axă Ahh numit axa șurubului. Când vectorii și sunt direcționați într-o direcție, atunci cu regula de imagine pe care am adoptat-o, șurubul va fi dreapta; dacă în direcții diferite - stânga. Se numește distanța parcursă în timpul unei revoluții de orice punct al corpului situat pe axa șurubului pasul hşurub Dacă valorile sunt constante, atunci și pasul șurubului va fi constant. Indicând timpul unei revoluții prin T, obținem în acest caz și , de unde .
Cu un pas constant, orice punct M corp, care nu se află pe axa șurubului, descrie linia helix. Viteza punctului M, situat de la axa șurubului la distanță r, constă din viteza de translație și viteza perpendiculară pe aceasta, obținută în mișcare de rotație, care este numeric egală cu ω r. Prin urmare ![]() .
.
Viteza este direcționată tangențial la spirală. Dacă suprafaţa cilindrică de-a lungul căreia se mişcă punctul M, tăiați de-a lungul generatricei și desfășurați, apoi liniile elicoidale se vor transforma în linii drepte, înclinate spre baza cilindrului într-un unghi, unde ![]() .
.
3. Viteza mișcării de translație formează un unghi arbitrar cu axa de rotație. Mișcarea complexă efectuată de corp în acest caz (Fig. 81, a) poate fi considerată ca un caz general al mișcării unui corp rigid liber.
Să descompunăm vectorul (Fig. 81, b) în componente: , îndreptată de-a lungul () și perpendiculară () . Viteza poate fi înlocuită cu o pereche de viteze unghiulare și , după care vectorii și pot fi aruncați. Distanţă ACîl vom găsi folosind formula.
Apoi corpul rămâne în rotație cu viteza unghiulară și mișcarea de translație cu viteza. În consecință, distribuția vitezelor punctelor corpului la un moment dat va fi aceeași ca în timpul mișcării șuruburilor în jurul axei. Ss cu viteza unghiulara si viteza de translatie.
După finalizarea transformărilor (Fig. 81, b), ne-am mutat de la pol A la stâlp CU. Rezultatul confirmă că în cazul general al mișcării unui corp rigid, viteza unghiulară nu se modifică atunci când polul se schimbă (), ci se modifică doar viteza de translație ().
Deoarece în timpul mișcării unui corp rigid liber mărimile , α se vor schimba tot timpul, și poziția axei se va schimba continuu Ss, care de aceea se numește axa șurubului instantaneu. Prin urmare, mișcarea unui corp rigid liber poate fi de asemenea considerată ca constând dintr-o serie de mișcări instantanee ale șuruburilor în jurul axelor șuruburilor care se schimbă continuu.
Concluzie
Rolul și locul mecanicii teoretice în învățământul ingineresc este determinat de faptul că este baza științifică pentru multe domenii ale tehnologiei moderne. Asimilarea mecanicii teoretice este complicată de faptul că în această știință un rol semnificativ îl joacă modelarea și reprezentarea matematică a fenomenelor naturale studiate. Prin urmare, studenții întâmpină adesea dificultăți semnificative atunci când rezolvă probleme de inginerie. Problema dezvoltării unei abordări de cercetare la studenți a sarcinilor atribuite (din secțiunea „Cinematică” a cursului de mecanică teoretică) poate fi rezolvată prin manualul propus. Manualul acoperă în mod clar subiectele principale ale secțiunii „Cinematică” cu toate dovezile necesare. Sunt oferite recomandări metodologice pentru rezolvarea problemelor și sunt date exemple de rezolvare a acestora. Sarcinile pentru munca independentă prezentate la sfârșitul capitolelor din manual vă vor ajuta să stăpâniți și să consolidați materialul prezentat.
Să luăm în considerare mișcarea complexă a unui corp rigid, constând din mișcări de translație și rotație. Un exemplu corespunzător este prezentat în Fig. 207. Aici, mișcarea relativă a corpului 1 este rotația cu viteza unghiulară c în jurul unei axe fixate pe platforma 2, iar mișcarea portabilă este mișcarea de translație a platformei cu viteza v. În același timp, roata 3 participă și la două astfel de mișcări, pentru care mișcarea relativă este rotația în jurul axei sale, iar mișcarea portabilă este mișcarea aceleiași platforme. În funcție de valoarea unghiului a dintre vectori și v (pentru o roată acest unghi este de 90°), aici sunt posibile trei cazuri.
1. Viteza mișcării de translație este perpendiculară pe axa de rotație Fie mișcarea complexă a unui corp compusă din mișcare de rotație în jurul unei axe cu viteza unghiulară co și mișcare de translație cu viteza v, perpendiculară (Fig. 208).


Este ușor de observat că această mișcare este (față de planul P, perpendicular pe ax) o mișcare plan-paralelă, studiată în detaliu în Cap. XI. Dacă considerăm că punctul A este un pol, atunci mișcarea în cauză, ca orice mișcare plan-paralelă, va fi de fapt compusă din mișcare de translație cu viteză, adică cu viteza polului și mișcare de rotație în jurul unei axe care trece prin polul.
Vectorul v poate fi înlocuit cu o pereche de viteze unghiulare (vezi § 69) luând . În acest caz, distanța AR va fi determinată din egalitatea de unde (ținând cont de faptul că)
Vectorii se adună până la zero și obținem că mișcarea corpului în acest caz poate fi considerată ca rotație instantanee în jurul unei axe cu viteză unghiulară. Acest rezultat a fost obținut anterior într-un mod diferit (vezi § 56). Comparând egalitățile (55) și (107), vedem că punctul P pentru secțiunea S a corpului este centrul instantaneu al vitezelor.Aici suntem din nou convinși că rotația corpului în jurul axelor are loc cu aceeași viteză unghiulară. , adică că partea de rotație a mișcării nu depinde de alegerea stâlpului (vezi § 52).
2. Mișcarea șurubului (). Dacă mișcarea complexă a unui corp constă din mișcare de rotație în jurul unei axe cu viteza unghiulară co și mișcare de translație cu viteza v îndreptată paralel cu axa (Fig. 209), atunci o astfel de mișcare a corpului se numește mișcare șurub. Axa se numește axa șurubului.
Când vectorii sunt direcționați într-o direcție, atunci cu regula de imagine pe care am adoptat-o, șurubul va fi în dreapta; dacă în direcții diferite – stânga.
Distanța parcursă în timpul unei revoluții de orice punct al corpului situat pe axa șurubului se numește pasul h al șurubului. Dacă valorile și și c sunt constante, atunci pasul elicei va fi, de asemenea, constant. Notând timpul unei revoluții prin T, obținem în acest caz , din care


Cu pas constant, orice punct M al corpului care nu se află pe axa șurubului descrie o linie elicoidală. Viteza punctului M, situat la o distanță de axa elicei, este compusă din viteza de translație v și viteza perpendiculară pe aceasta, obținută în mișcare de rotație, care este numeric egală cu Prin urmare,
![]()
Viteza este direcționată tangențial la spirală. Dacă suprafața cilindrică de-a lungul căreia se mișcă punctul M este tăiată de-a lungul generatricei și întoarsă, atunci liniile elicoidale se vor transforma în linii drepte, înclinate la baza cilindrului într-un unghi.
3. Viteza mișcării de translație formează un unghi arbitrar cu axa de rotație. Mișcarea complexă efectuată de corp în acest caz (Fig. 210, a) este mișcarea discutată în § 63 (cazul general al mișcării unui corp rigid liber).
Să descompunăm vectorul v (Fig. 210, b) în componentele sale: Viteza perpendiculară direcționată de-a lungul și poate fi înlocuită cu o pereche de viteze unghiulare (ca în Fig. 208), după care vectorii pot fi aruncați. Găsim distanța AC folosind formula (107).



