движение твердого тела, как и движение точки, может быть сложным.
Пусть тело совершает некоторое движение относительно системы координат 0x 1 y 1 z 1 , которая, в свою очередь, движется относительно неподвижных осей 0xyz .Относительным движением тела называют его движение по отношению к подвижной системе координат 0x 1 y 1 z 1 . Для выяснения переносного движения тела в каждый момент времени следует считать тело жестко скрепленным с подвижной системой отсчета, и движение, которое будет совершать тело с подвижной системой отсчета относительно неподвижной системы, и будет переносным движением. Движение тела относительно неподвижной системы координат называетсяабсолютным .
Основной задачей кинематики сложного движения твердого тела является установление соотношений между кинематическими характеристиками абсолютного, относительного и переносного движений. Сложное движение твердого тела может состоять из поступательных и вращательных движений или может быть получено в результате сложения поступательного и вращательного движений. В некоторых задачах кинематики заданное сложное движение твердого тела раскладывают на составляющие движения (анализ); в других - требуется определить сложное движение как результат сложения более простых (синтез). Как при анализе, так и при синтезе движений речь идет о разложении и сложении движений, рассматриваемых в данный момент (мгновенных движений).
Сложение поступательных движений твердого тела
Пусть твердое тело одновременно участвует в двух мгновенно поступательных движениях, из которых одно является поступательным со скоростью v 1 , второе - переносным со скоростью v 2 (рис 2.73). Выделим какую-либо точку М тела. Найдем абсолютную скорость точки М
v a = v r + v e = v 1 + v 2 . (2.113)
Так как и относительное, и переносное движение твердого тела являются мгновенно поступательными, то относительные, переносные и, следовательно, согласно формуле (2.113), абсолютные скорости всех точек тела будут равны между собой в каждый момент времени (равны по величине и параллельны по направлению), т.е. абсолютное движение тела также является мгновенно поступательным.
Очевидно, что данный вывод применим к сложному движению твердого тела, состоящему из трех и более мгновенно поступательных движений, тогда в общем случае
Итак, в результате сложения мгновенных поступательных движений твердого тела результирующее движение получается мгновенно поступательным.
Замечание . Мгновенно поступательное движение твердого тела отличается от поступательного тем, что при поступательном движении в каждый момент времени равны между собой скорости и ускорения всех точек тела, а при мгновенно поступательном движении в данный момент времени равны между собой только скорости всех точек тела.
66, 67 Сложение вращений вокруг параллельных осей
Рассмотрим случай, когда относительное движение тела является вращением
с угловой скоростью вокруг оси , закрепленной на кривошипе (рис.1а), а переносное – вращением кривошипа вокруг оси , параллельной , с угловой скоростью . Тогда движение тела будет плоскопараллельным по отношению к плоскости, перпендикулярной к осям.
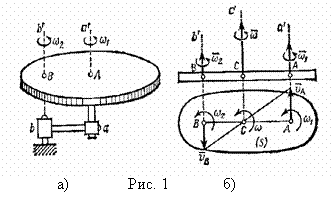
Примем, что вращения направлены в одну сторону. Изобразим сечение тела плоскостью, перпендикулярной осям (рис. 1 б). Следы осей в сечении обозначим буквами и . Тогда и . При этом векторы и параллельны друг другу, перпендикулярны и направлены в разные стороны. Тогда точка является мгновенным центром скоростей , а следовательно, ось , параллельная осям и , является мгновенной осью вращения. Для определения угловой скорости абсолютного вращения тела вокруг оси и положения самой оси, т.е. точки , воспользуемся свойством мгновенного центра скоростей
![]() .
.
Подставив в эти равенства значения и , окончательно получим
Итак, при сложении двух направленных в одну сторону вращений вокруг параллельных осей результирующее движение тела будет мгновенным вращением с абсолютной скоростью вокруг мгновенной оси, параллельной данным, положение которой определяется пропорциями (2).
С течением времени мгновенная ось вращения меняет свое положение, описывая цилиндрическую поверхность.

Рассмотрим теперь случай, когда вращения направлены в разные стороны (рис.2).
Допустим, что . Тогда, рассуждая, как в предыдущем случае, для угловой скорости абсолютного движения тела вокруг оси и положения самой оси, получим
Таким образом, при сложении двух направленных в разные стороны вращений вокруг параллельных осей, результирующее движение тела будет мгновенным вращением с абсолютной угловой скоростью вокруг мгновенной оси, положение которой определяется пропорциями (4).
Заметим, что в этом случае точка делит расстояние между параллельными осями внешним образом.
Рассмотрим частный случай, когда вращения вокруг параллельных осей направлены в разные стороны, но по модулю (рис.3).

Такая совокупность вращений называется парой вращений, а векторы и образуют пару угловых скоростей. В этом случае получим и , то есть = . Тогда мгновенный центр скоростей находится в бесконечности и все точки тела в данный момент времени имеют одинаковые скорости .
Следовательно, результирующее движение тела будет поступательным (или мгновенно поступательным) движением со скоростью, численно равной и направленной перпендикулярно плоскости, проходящей через векторы и . Таким образом, пара вращений эквивалентна мгновенно поступательному движению со скоростью , равной моменту пары угловых скоростей этих вращений.
Примером пары угловых скоростей является движение велосипедной педали относительно рамы велосипеда (рис.4).

Это движение представляет собой совокупность переносного вращения вместе с кривошипом вокруг оси и относительного вращения педали по отношению к кривошипу вокруг оси . Педаль за все время движения остается параллельной своему первоначальному положению, т.е. совершает поступательное движение.
Рассмотрим несколько примеров.
Пример 1. Кривошип вращается вокруг оси по часовой стрелке с угловой скоростью , а диск радиуса вращается вокруг оси по часовой стрелке с той же угловой скоростью относительно кривошипа. Найти величину и направление абсолютных скоростей точек и (рис.5).

Решение.
Так как угловые скорости переносного
и относительного вращений равны по
модулю и направлены в одну сторону, то
мгновенный центр вращений диска
лежит посредине между и ,
т.е. ![]() .
Модуль абсолютной угловой скорости вращения
диска вокруг точки равен .
Отсюда находим:
.
Модуль абсолютной угловой скорости вращения
диска вокруг точки равен .
Отсюда находим:
![]() , ,
, ,
![]() , .
, .

Пример 2. Кривошип вращается вокруг оси с угловой скоростью . На палец кривошипа свободно насажена шестерня радиуса , сцепленная с неподвижным зубчатым колесом радиуса . Найти абсолютную угловую скорость шестерни и ее угловую скорость относительно кривошипа (рис.6).
Решение.
Так как шестерня сцеплена с неподвижным
колесом, то абсолютная скорость
точки зацепления
шестерни с этим колесом равна нулю, т.е.
точка является
для шестерни мгновенным центром вращения.
Отсюда ![]() или ,
или ,
Заметим, что направление вращения шестерни совпадает с направлением вращения кривошипа.
Тогда абсолютную угловую скорость шестерни находим из равенства
Если тело одновременно участвует в переносном поступательном движении со скоростью и относительном вращательном с угловой скоростью , то в зависимости от их взаимного расположения целесообразно рассмотреть три отдельных случая.
1. Скорость поступательного движения перпендикулярна оси относительного вращения. В этом случае векторы и перпендикулярны (рис.53). На линии ОС , перпендикулярной плоскости в которой расположены и , имеется точка С , скорость которой равна нулю. Определяем ее расстояние от точки О .
По теореме сложения скоростей для точки С имеем
так как при вращении вокруг оси
Учитывая, что скорости и противоположны по направлению, получим
Так как , то и, следовательно, точки С и О находятся на расстоянии
Другие точки, имеющие скорости, равные нулю, располагаются на линии, проходящей через точку С , параллельно оси вращения тела с угловой скоростью . Таким образом, имеется мгновенная ось вращения, параллельная оси относительного вращения и проходящая через точку С .
При сложении поступательного переносного и вращательного относительного движений твердого тела, у которого скорость поступательного движения перпендикулярна оси относительного вращения, эквивалентное абсолютное движение является вращением вокруг мгновенной оси, параллельной оси относительного вращения с угловой скоростью, совпадающей с угловой скоростью относительного вращения.
2. Винтовое движение. Движение, при котором скорость переносного поступательного движения тела параллельна оси относительного вращения, называется в и н т о в ы м д в и ж е н и е м т в е р д о г о т е л а (рис.54). Ось вращения тела в этом случае называется в и т о в о й о с ь ю. При винтовом движении тело движется поступательно параллельно оси винтового движения и вращается вокруг этой оси. Винтовое движение не приводится к какому-либо другому одному простому эквивалентному движению.
При винтовом движении векторы и могут иметь как одинаковые, так и противоположные направления. Винтовое движение тела характеризуется п а р а м е т р о м в и н т о в о г о г о д в и ж е н и я, которым считают величину . Если и изменяются с течением времени, то и параметры винтового движения являются переменными. В общем случае , и , т.е. p есть перемещение тела вдоль оси винтового движения при повороте тела на один радиан.
Для точки М имеем
Но , , где r – расстояние точки до винтовой оси. Скорости и перпендикулярны. Следовательно,
Учитывая, что , получаем
Если тело вращается с постоянной угловой скоростью и имеет постоянную скорость поступательного движения, то такое движение тела называется п о с т о я н н ы м в и н т о в ы м движением. В этом случае точка тела при движении все время находится на поверхности кругового цилиндра с радиусом r. Траекторией точки является винтовая линия. Кроме параметра в рассматриваемом случае вводят шаг винта , т. е. расстояние, на которое переместится какая-либо точка тела при одном обороте тела вокруг оси винтового движения. Угол поворота тела при вычисляется по формуле . Для одного оборота тела . Необходимое для этого время .
За время Т точка переместится в направлении, параллельном винтовой оси, на шаг винта .
Отсюда получается зависимость шага винта от параметра винтового движения .
Уравнения движения точки М тела по винтовой линии (рис.102) в декартовых координатах выражаются в следующей форме:
В этих уравнениях величины и являются постоянными.
3. Общий случай. Пусть скорость переносного поступательного движения и угловая скорость относительного вращения образуют угол . Случай когда , и , уже рассмотрены.имеют все точки тела. Таким образом, получено винтовое движение с винтовой осью, отстоящей от первоначальной оси вращения на величину .
Параметр полученного винтового движения .
Общий случай переносного поступательного и относительного вращательного движений твердого тела оказался эквивалентным мгновенному винтовому движению.
Подробности Категория: Просмотров: 975
ВИНТОВОЕ ДВИЖЕНИЕ . Если движение неизменяемой системы (например, твердого тела) слагается из вращения около оси и поступательного движения вдоль этой оси, то такое движение тела называется винтовым движением; указанная ось называется винтовой осью, или осью вращения - скольжения. Если даны два произвольных положения движущегося в пространстве тела, то переход из положения I во II можно выполнить одним винтовым движением около определенно расположенной винтовой оси (теорема Шаля); при этом вращательное и поступательное движения могут выполняться или одновременно, или последовательно в любом порядке. Рассматривая все данное перемещение тела в пространстве как состоящее из бесконечно малых элементарных перемещений и применяя к каждому из них теорему Шаля, получаем следующее положение: всякое движение тела в пространстве представляет собой ряд бесконечно малых винтовых перемещений около мгновенных винтовых осей, в каждый момент меняющих свое положение и направление в пространстве.
Винтовые элементарные перемещения тела около каждой мгновенной оси являются движениями, эквивалентными бесконечно малым действительным перемещениям тела, и представляют их с точностью до бесконечно малых величии высших порядков. Законы винтового перемещения, эквивалентного какому-либо перемещению твердого тела, были установлены Моцци (Giulio Mozzi, 1768 г.). Сложение двух винтовых перемещений дает в результате также винтовое перемещение.
Рассмотрим сложное движение твердого тела, слагающееся из поступательного и вращательного движений. Соответствующий пример показан на рис. 78. Здесь относительным движением тела 1 является вращение с угловой скоростью вокруг оси Аа ,укрепленной на платформе 2, а переносным – поступательное движение платформы со скоростью . Одновременно в двух таких движениях участвует и колесо 3, для которого относительным движением является вращение вокруг его оси, а переносным – движение той же платформы. В зависимости от значения угла α между векторами и (для колеса этот угол равен 90°) здесь возможны три случая.
1. Скорость поступательного движения перпендикулярна оси вращения ( ). Пусть сложное движение тела слагается из вращательного движения вокруг оси Аа с угловой скоростью ω и поступательного движения со скоростью , перпендикулярной (рис. 79). Очевидно, что это движение представляет собой (по отношению к плоскости П , перпендикулярной оси Аа )плоскопараллельное движение.
Если считать точку А полюсом, то рассматриваемое движение, как и всякое плоскопараллельное будет действительно слагаться из поступательного со скоростью , т. е. со скоростью полюса, и из вращательного вокруг оси Аа , проходящей через полюс.
Вектор , согласно разделу 6.2, можно заменить парой угловых скоростей и , принимая , а . При этом расстояние АР определится из равенства , откуда .
Векторы и дают при сложении ноль и, следовательно, движение тела в этом случае можно рассматривать как мгновенное вращение вокруг оси Рр с угловой скоростью . Таким образом, поворот тела вокруг осей Аа и Рр происходит с одной и той же угловой скоростью , т. е. вращательная часть движения не зависит от выбора полюса.
2. Винтовое движение ( ). Если сложное движение тела слагается из вращательного вокруг оси Аа с угловой скоростью и поступательного со скоростью , направленной параллельно оси Аа (рис. 80), то такое движение тела называется винтовым. Ось Аа называют осью винта. Когда векторы и направлены в одну сторону, то при принятом нами правиле изображения винт будет правым ; если в разные стороны – левым. Расстояние, проходимое за время одного оборота любой точкой тела, лежащей на оси винта, называется шагом h винта. Если величины и постоянны, то шаг винта также будет постоянным. Обозначая время одного оборота через Т , получаем в этом случае и , откуда .
При постоянном шаге любая точка М
тела, не лежащая на оси винта, описывает винтовую линию.
Скорость точки М
, находящейся от оси винта на расстоянии r
,слагается из поступательной скорости и перпендикулярной ей скорости, получаемой во вращательном движении, которая численно равна ωr.
Следовательно ![]() .
.
Направлена скорость по касательной к винтовой линии. Если цилиндрическую поверхность, по которой движется точка М,
разрезать вдоль образующей и развернуть, то винтовые линии обратятся в прямые, наклоненные к основанию цилиндра под углом , где ![]() .
.
3. Скорость поступательного движения образует произвольный угол с осью вращения. Сложное движение, совершаемое телом в этом случае (рис. 81, а), можно рассматривать, как общий случай движения свободного твердого тела.
Разложим вектор (рис. 81, б) на составляющие: , направленную вдоль (), и , перпендикулярную (). Скорость можно заменить парой угловых скоростей и , после чего векторы и можно отбросить. Расстояние АС найдем по формуле .
Тогда у тела остается вращение с угловой скоростью и поступательное движение со скоростью . Следовательно, распределение скоростей точек тела в данный момент времени будет таким же, как при винтовом движении вокруг оси Сс с угловой скоростью и поступательной скоростью .
Выполнив преобразования (рис. 81, б), мы перешли от полюса А к полюсу С . Результат подтверждает, что в общем случае движения твердого тела угловая скорость при перемене полюса не изменяется (), а меняется только поступательная скорость ().
Так как при движении свободного твердого тела величины , α будут все время изменяться, то будет непрерывно меняться и положение оси Сс , которую поэтому называют мгновенной винтовой осью. Таким образом, движение свободного твердого тела можно еще рассматривать как слагающееся из серии мгновенных винтовых движений вокруг непрерывно изменяющихся винтовых осей .
Заключение
Роль и место теоретической механики в инженерном образовании определяется тем, что она является научной базой очень многих областей современной техники. Усвоение теоретической механики усложняется тем, что в этой науке существенную роль играет моделирование и математическое представление исследуемых явлений природы. Поэтому при решении инженерных задач студенты зачастую испытывают значительные трудности. Проблему формирования у студентов исследовательского подхода к поставленным задачам (из раздела «Кинематика» курса теоретической механики) позволяет решить предлагаемое учебное пособие. В пособии доступно освещены основные темы раздела «Кинематика» с приведением всех необходимых доказательств. Даны методические рекомендации к решению задач и приведены примеры их решения. Освоению и закреплению изложенного материала помогут задания для самостоятельной работы, приведенные в конце глав пособия.
Рассмотрим сложное движение твердого тела, слагающееся из поступательного и вращательного движений. Соответствующий пример показан на рис. 207. Здесь относительным движением тела 1 является вращение с угловой скоростью со вокруг оси укрепленной на платформе 2, а переносным - поступательное движение платформы со скоростью v. Одновременно в двух таких движениях участвует и колесо 3, для которого относительным движением является вращение вокруг его оси, а переносным - движение той же платформы. В зависимости от значения угла а между векторами и v (для колеса этот угол равен 90°) здесь возможны три случая.
1. Скорость поступательного движения перпендикулярна оси вращения Пусть сложное движение тела слагается из вращательного движения вокруг оси с угловой скоростью со и поступательного движения со скоростью v, перпендикулярной (рис. 208).


Легко видеть, что это движение представляет собой (по отношению к плоскости П, перпендикулярной оси ) плоскопараллельное движение, подробно изученное в гл. XI. Если считать точку А полюсом, то рассматриваемое движение, как и всякое плоскопараллельное, будет действительно слагаться из поступательного со скоростью т. е. со скоростью полюса, и из вращательного вокруг оси проходящей через полюс.
Вектор v можно заменить парой угловых скоростей (см. § 69), беря . При этом расстояние АР определится из равенства откуда (учитывая, что )
Векторы дают при сложении нуль, и мы получаем, что движение тела в этом случае можно рассматривать как мгновенное вращение вокруг оси с угловой скоростью . Этот результат был раньше получен другим путем (см. § 56). Сравнивая равенства (55) и (107), видим, что точка Р для сечения S тела является мгновенным центром скоростей Здесь еще раз убеждаемся, что поворот тела вокруг осей происходит с одной и той же угловой скоростью , т. е. что вращательная часть движения не зависит от выбора полюса (см. § 52).
2. Винтовое движение (). Если сложное движение тела слагается из вращательного вокруг оси с угловой скоростью со и поступательного со скоростью v, направленной параллельно оси (рис. 209), то такое движение тела называется винтовым. Ось называют осью винта.
Когда векторы направлены в одну сторону, то при принятом нами правиле изображения о винт будет правым; если в разные стороны, - левым.
Расстояние, проходимое за время одного оборота любой точкой тела, лежащей на оси винта, называется шагом h винта. Если величины и и со постоянны, то шаг винта также будет постоянным. Обозначая время одного оборота через Т, получаем в этом случае , откуда


При постоянном шаге любая точка М тела, не лежащая на оси винта, описывает винтовую линию. Скорость точки М, находящейся от оси винта на расстоянии , слагается из поступательной скорости v и перпендикулярной ей скорости, получаемой во вращательном движении, которая численно равна Следовательно,
![]()
Направлена скорость по касательной к винтовой линии. Если цилиндрическую поверхность, по которой движется точка М, разрезать вдоль образующей и развернуть, то винтовые линии обратятся в прямые, наклоненные к основанию цилиндра под углом
3. Скорость поступательного движения образует произвольный угол с осью вращения. Сложное движение, совершаемое телом в этом случае (рис. 210, а), представляет собой движение, рассмотренное в § 63 (общий случай движения свободного твердого тела).
Разложим вектор v (рис. 210, б) на составляющие: направленную вдоль со перпендикулярную Скорость можно заменить парой угловых скоростей (как на рис. 208), после чего векторы можно отбросить. Расстояние АС найдем по формуле (107).



